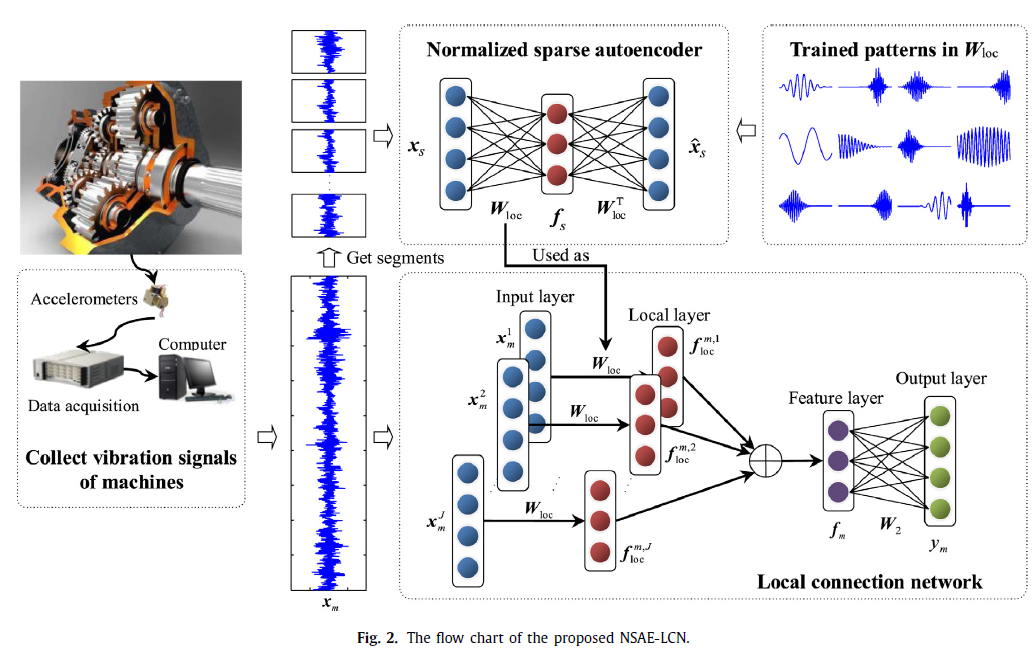
본 게시물에서는 "A neural network constructed by deep learning technique and its application to intelligent fault diagnosis of machines" (Jia et al. 2017) 논문을 리뷰하도록 하겠습니다. 이 논문에서는 bearing fault detection 문제를 해결하기 위해 Autoencoder 모델을 사용했습니다. Introduction 저자는 먼저 bearing fault detection에 전통적인 오토인코더를 적용하는 것에 대해 두 가지 문제를 지적했습니다. 첫 번째는 classifier에 넣기 위해 feature를 추출할 때, 사실 너무 비슷한 feature가 많다는 것입니다. 따라서 실제로 분류에..